Vernetzte Mobilität der Zukunft
von Klaas Mertens
 Geht es um innovative Ideen und Zukunftsszenarien, wird insbesondere in Deutschland kaum ein Thema so häufig und ausführlich diskutiert wie digitale Möglichkeiten rund ums Automobil. Für viele, die sich in der aktuellen Debatte zu Wort melden, steht fest: Das Auto der Zukunft fährt elektrisch und autonom.
Geht es um innovative Ideen und Zukunftsszenarien, wird insbesondere in Deutschland kaum ein Thema so häufig und ausführlich diskutiert wie digitale Möglichkeiten rund ums Automobil. Für viele, die sich in der aktuellen Debatte zu Wort melden, steht fest: Das Auto der Zukunft fährt elektrisch und autonom.
Vor allem hinsichtlich des rasanten Bevölkerungswachstums und des Urbanisierungstrends zielen beide Eigenschaften des Autos der Zukunft darauf ab, unsere Fortbewegung im Verkehr sicherer, effizienter und sauberer zu gestalten.
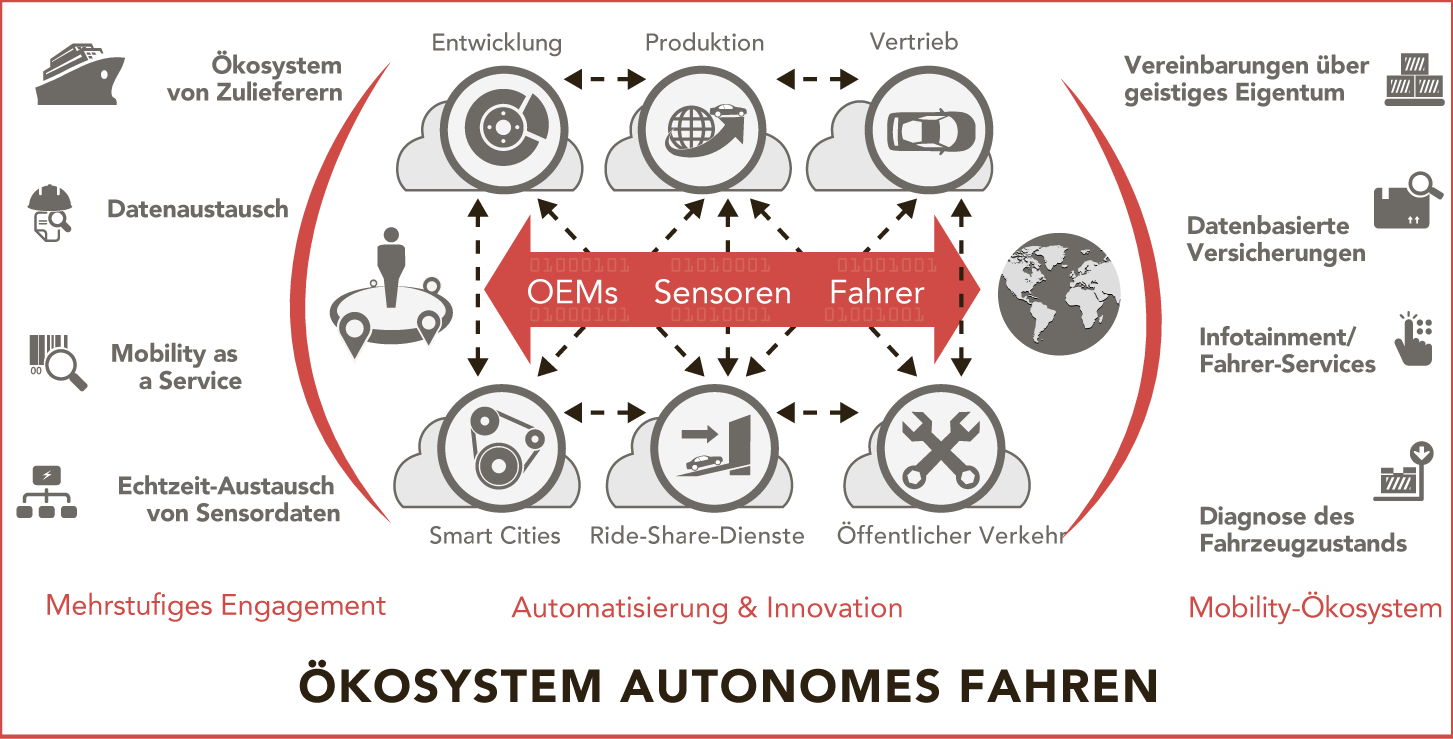
Mit Blick auf das Konzept Smart City bedeutet vernetzte Mobilität aber weitaus mehr als autonom fahrende Autos. Als Teil einer übergreifenden Vision stehen alle Teilnehmer des gesellschaftlichen Zusammenlebens künftig miteinander im Austausch.
Vernetzte Mobilität bedeutet also auch, dass Transport-, Notfall- und Informationssysteme innerhalb und zwischen Städten – darunter u. a. auch der Nah- und Fernverkehr – miteinander verbunden sind, d. h. Daten austauschen und verarbeiten. Alles mit dem Ziel, sich in der Bereitstellung ihrer Services untereinander abzustimmen.
Autonomes Fahren – Realität und Zukunftsvision
Das autonome Fahrzeug, wie es auch gerne genannt wird, existiert als solches nicht. Vielmehr gibt es eine Reihe von Automatisierungs- und Assistenzsystemen, die in unterschiedlichem Umfang Autonomiefunktionen bereitstellen. Der Weg hin zum autonomen Fahrzeug ist ein Prozess. Autohersteller definieren heute anhand sogenannter Assistenzklassen, in welchem Umfang das Fahrzeug die Aufgaben des Fahrers bei Bedarf übernehmen kann und wie Mensch und Maschine auf der Straße interagieren (→ Übersicht).
| Die fünf Assistenzklassen | |
| 0. | Der Fahrer lenkt und fährt ohne jegliche Unterstützung. |
| 1. | Assistiertes Fahren: Assistenzsysteme übernehmen zeitweise Kontrolle unter Aufsicht des Fahrers. |
| 2. | Teilautomatisiertes Fahren: Lenk- und Spurassistenten übernehmen in bestimmten Geschwindigkeitsbereichen. |
| 3. | Hoch automatisiertes Fahren: Die Fahraufgabe wird unter bestimmten Voraussetzungen und für kurze Zeit ganz auf das Fahrzeug abgegeben. |
| 4. | Voll automatisiertes Fahren: Das Fahrzeug kann über längere Zeit eigenständig die Kontrolle übernehmen. |
| 5. | Autonomes Auto: Hier fährt das Fahrzeug durchgehend autonom. |
Schon heute können Fahrzeuge einzelne Schritte im Stufen-Modell übernehmen. Die fortschrittlichsten Neuwagen decken aktuell die Stufen zwei und drei ab. Entscheidend ist jedoch, dass im gegenwärtigen Entwicklungsstand Autonomie bedeutet, dass Systeme im Auto unterstützend für den Fahrer in seiner Rolle wirken, anstatt diese völlig zu übernehmen.
Der Fahrer behält also zunächst die komplette Kontrolle. Zudem findet die gesamte Datenverarbeitung im Auto selber statt. Das bedeutet, dass das Auto seine Fahrassistenz-Leistungen noch nicht mithilfe externer Sensoren und Unterstützung, wie etwa durch Leitsysteme auf und neben der Autobahn, umsetzt.
Fahrzeughersteller arbeiten heute schon an Systemen der Stufe drei und vier, für deren Markteintritt sie in den kommenden Jahren im Wettbewerb miteinander stehen. Während Fahrzeuge zu Beginn der Skala entwicklungstechnisch recht nah beieinanderliegen, gestaltet sich der Schritt hin zum teilautonomen Fahrzeug deutlich schwieriger. Vorher müssen von den Entwicklern noch viele Aufgaben gelöst werden.
Neben ethischen Bedenken, der Frage nach gesetzlichen Rahmenbedingungen und kommunikativen Hürden, wie beispielsweise der Entwicklung einer standardisierten Sprache zwischen verschiedenen Herstellern und Fahrzeugen, steht auch das technische Fundament der Vision vom Auto der Zukunft im Vordergrund: nämlich der Aufbau und die Bereitstellung flächendeckender, digitaler Infrastrukturen.
Infrastruktur und digitale Ökosysteme
Damit die Zukunftsvision des autonomen Fahrzeugs schon bald Realität werden kann, müssen solide und hochverfügbare Netze und IT-Infrastrukturen errichtet werden. Sie bilden das Rückgrat der „vernetzten Mobilität“. Während der Fahrt sendet und empfängt das autonome und vernetzte Fahrzeug ständig neue Daten. Durchgehend werden Informationen am Auto gesammelt oder im Austausch mit anderen Verkehrsteilnehmern übertragen – sei es über Geschwindigkeit, Abstand zu anderen Fahrzeugen, GPS-Daten, Verkehrssteuerung oder Wetterbedingungen.
„Durch die Restrukturierung von bestehenden IT-Infrastrukturen und mithilfe der Lokalisierung von Cloud-Services können Daten direkt an dem Ort analysiert und verarbeitet werden, an dem der größte Bedarf besteht. Unternehmen, die auf Interconnection setzen, erhalten zudem Zugriff auf sichere und direkte Hochgeschwindigkeitsverbindungen mit niedriger Latenzzeit.“
– Klaas Mertens –
Hinzu kommt, dass das Fahrzeug nicht nur eine große Menge an Daten bewältigen muss, sondern auch, dass die Verarbeitung für eine reibungslose und komfortable Fahrt in nahezu Echtzeit geschehen muss. Aktuell spielt die Verarbeitung einer großen Menge an Daten, insbesondere in der Entwicklung autonomer Autos, eine entscheidende Rolle.
Testfahrzeuge generieren bis zu 80 bis 100 Terabyte an Daten pro Tag. Aufs Jahr betrachtet, sind das ca. 16 Petabyte pro Fahrzeug. Zum Vergleich: 16 Petabyte entsprechen auch 8 Billionen mit Text gefüllten Dokumentseiten oder 104 Milliarden Fotos auf Facebook. Ein anderer Fokus ergibt sich für die künftig zu entwickelnden serienreifen Fahrzeuge. Sie müssen geringere Mengen an Daten vor allem sehr schnell verarbeiten und auf diese zugreifen können.
| Wachstumsmotor Ökosystem autonomes Fahren | |
| • | Proaktive Bereitstellung neuer Angebote und Dienstleistungen basierend auf verteilten Daten |
| • | Schnellere und kosteneffiziente Umsetzung von innovativen Projekten durch den Zugang zum Ökosystem |
| • | Einrichtung verteilter Data Hubs zur Datenverarbeitung innerhalb wichtiger Ballungsräume (Echtzeit-Kommunikation) |
| • | Vereinfachte Konnektivität durch direkte und sichere Verbindungen mittels Interconnection |
Der explosionsartige Anstieg von Daten in der Entwicklungs- und Testphase der Algorithmen des autonomen Fahrens stellt Autohersteller vor große Herausforderungen. Denn die benötigte Speicherkapazität für die Verarbeitung dieser Datenmengen ist enorm. Die Schwierigkeit liegt dabei aber nicht nur im Speichern der Datenmenge, sondern auch in deren Übertragung. Denn die gesammelten Datenmengen müssen schließlich zur Auswertung von den Fahrzeugen in die Verarbeitungsplattform transferiert werden.
In Zukunft ist auch die Sicherstellung der Kommunikation unterschiedlichster Systeme und Fahrzeuge untereinander von großer Bedeutung, wenn z. B. Bordkameras die Umgebung rund um das Auto überwachen, um Unfälle zu verhindern, bevor sie passieren.
Noch während das Auto diese Daten produziert, muss es entscheiden: Welche Daten können von der im Auto eingebauten IT selbst verarbeitet werden? Und was muss zur Verarbeitung an einen zentralen Standort übertragen werden?
Diese Verbindung zu Clouds, Netzwerken und anderen Teilnehmern des Ökosystems muss möglichst schnell, zu jeder Zeit und weltweit an jedem Standort gewährleistet sein. Denn schließlich sind Autos mobil.
Hier kommen Rechenzentren und darin angesiedelte digitale Ökosysteme ins Spiel, auf deren Plattform verschiedene Teilnehmer des digitalen Lebens zusammentreffen. Teilnehmer eines digitalen Ökosystems arbeiten und kommunizieren im Einklang miteinander.
Für das autonome Fahrzeug bedeutet das konkret: Der Anbieter der städtischen Ampelsysteme, der die Information über „weiterfahren“ oder „halten“ an das auf die Ampel zufahrende Auto senden muss, kommuniziert mit dem Empfänger-Auto direkt und über eine zuverlässige und schnelle Verbindung mit anderen Partnern im Ökosystem, im Rechenzentrum oder der Cloud. So wird sichergestellt, dass die Information schnell und sicher übertragen wird.
Gleichzeitig garantiert diese Art der Verbindung auch, dass die Datenübertragung zuverlässig erfolgt. Eine räumliche Nähe der einzelnen Partner innerhalb einer Lokation ermöglicht hierbei zudem Datenaustausch nahezu in Echtzeit.
Auf dem Weg zum vernetzten, autonomen Fahrzeug stehen zwei Herausforderungen im Fokus, die gemeistert werden müssen.
Erstens: der Aufbau einer digitalen Infrastruktur, die es den unzähligen Sensoren ermöglicht, Daten an jeder Straßenecke und von jedem Verkehrsteilnehmer aufzunehmen, an die Auswertung weiterzugeben und untereinander auszutauschen.
Zweitens: die Entwicklung konkreter Algorithmen. Punkt eins und zwei sind unabhängig voneinander zu sehen. Denn während bei der Entwicklung von Algorithmen insbesondere die Sicherheit im Vordergrund steht (das Fahrzeug ist ein autarkes System), steht bei der Vernetzung der verschiedenen Systeme und Sensoren v. a. der Komfortgewinn des Verkehrsteilnehmers im Vordergrund.
Um die Sicherheit des autonomen Fahrzeugs zu gewährleisten, werden bei der Erprobung von Prototypen große Mengen an Sensordaten erhoben, um im nächsten Schritt valide Algorithmen aufstellen zu können. Ob die Algorithmen schließlich angemessen auf die Sensordaten reagieren, zeigt sich durch zweierlei Testarten: dem „In the Loop“-Testing, basierend zum einen auf der reinen Software, und zum anderen auf der später im Fahrzeug verbauten Hardware. Während die Testdaten und Algorithmen in Ersterem anhand der Fahrzeugsysteme als Software in der Cloud simuliert und überprüft werden, werden im Hardware-Testing die physischen Teile aus dem Auto, also beispielsweise Prozessoren und Spezialchips, aus dem Auto ausgebaut und direkt am Rechner im Rechenzentrum getestet.
Multimodale Mobilität als Zukunftsvision
Wenn auch gerade in der Entwicklungsphase des autonomen Fahrzeugs – also heute schon – Rechenzentren und digitale Infrastrukturen bei der Auswertung von unzähligen Test- und Sensordaten eine wesentliche Rolle spielen, wird deren Beitrag in einer Zukunft mit selbstfahrenden Autos unerlässlich sein.
Ziel ist es, eine flächendeckende Verfügbarkeit vernetzter Services, an jedem Ort der Welt und zu jeder Zeit, zu gewährleisten. Um dieses Ziel zu erreichen, müssen jedoch noch zahlreiche Datenaustauschpunkte geschaffen werden. Verteilt auf unzählige Rechenzentren, stellen diese dann sicher, dass Daten so schnell und zuverlässig wie möglich zwischen allen Teilnehmern des Verkehrs ausgetauscht werden.
So können selbstfahrende Autos in der Zukunft nicht nur auf das reagieren, was direkt vor und um sie herum geschieht und somit durch die fahrzeugeigenen Sensoren erfasst werden kann, sondern auch auf das, was viele Hunderte von Metern entfernt an der nächsten Straßenbiegung den eigenen Fahrtverlauf beeinflussen könnte.
Grundlage dafür, dass Fahrzeuge ständig miteinander und mit ihrer Umwelt im Austausch stehen und so den größtmöglichen Fahrkomfort und die höchsten Sicherheitsstandards für ihre Fahrgäste bieten, sind digitale Infrastrukturen. //
For an English version of this article, please click here
Kontakt zum Autor Klaas Mertens
| Der Text ist unter der Lizenz CC BY-SA 3.0 DE verfügbar. Lizenzbestimmungen: https://creativecommons.org/licenses/by-sa/3.0/de/ |